Subsystems of STEP Cube Lab.
Structure Subsystem (SS)
인공위성의 구조체는 발사환경 하에서 발생하는 정적 및 동적 하중에 대하여 탑재장비들을 안전하게 지지해주는 역할을 수행한다. 이에 따라 구조계는 상기의 발사환경 하에서 위성체가 구조적으로 안정하며, 시스템의 요구조건에 적합한 구조설계를 수행하여야 한다.
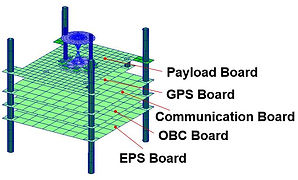
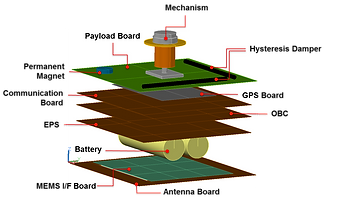
따라서 STEP Cube Lab.의 성공적인 임무수행을 위하여 선정된 5가지 탑재체를 상기 요구조건에 만족하도록 탑재하기 위한 형상설계를 수행하였다.또한 설계된 STEP Cube Lab.의 구조 건전성 확인을 목적으로 설계 형상에 따른 FEM(Finite Element Model)을 구축하여 구조 해석을 수행하였다. 구조해석은 상기의 발사환경을 고려하여 모드해석, 준 정적해석, 랜덤 진동 해석, PCB 해석을 수행하였다.
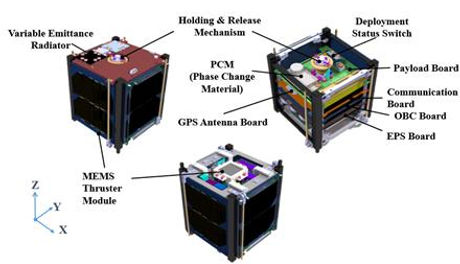
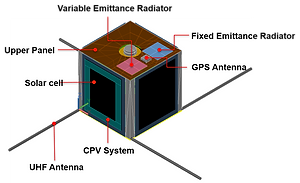
Designed Configuration of STEP Cube Lab.
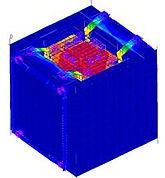
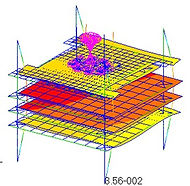
FEM(Finite Element Method) Structure Analysis (Patran/Nastran S/W)
FEM(Finite Element Method) Structure Analysis Results
(Left: 1st Mode, Right: 5th Mode)
Thermal Control Subsystem (TCS)
위성이 운용되는 우주 환경은 고진공과 고온 및 극저온의 극심한 온도변화를 겪는 열환경이다. 대표적으로 5570ºC의 흑체온도를 갖는 태양과 -270ºC의 심 우주로부터의 heat source와 heat sink는 우주 열환경의 극한치를 보여준다. 이러한 극한 우주 열환경 속에서 위성의 생존을 위해 열제어계는 모든 위성 부품이 각기 허용되는 온도범위 및 온도구배 내에서 유지되도록 설계하며, 위성의 열적 안정성을 책임진다.
큐브위성 또한, 궤도 상에서의 성공적인 임무수행을 위해 열제어 설계는 필수적이며, 극초소형 위성이라는 제한된 설계 특성 상, 전력/질량/시스템 단순화에 유리한 수동적인 방식을 기초로 열설계를 진행하였다. 열설계는 궤도 열환경과 위성 운용상태에 따른 worst case를 고려한 열해석을 기반으로 진행하며, 궤도 열해석에서는 범용 열해석 프로그램인 Thermal Desktop의 RadCAD와 온도 분포 해석을 위한 열해석 프로그램인 SINDA를 사용하였다.
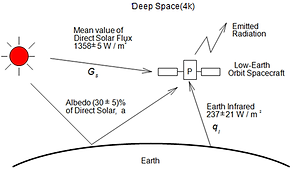
On-orbit Thermal Environment
STEP Cube Lab. TMM (Thermal Mathematical Model) on Thermal Desktop

On-orbit Thermal Analysis (SINDA S/W)
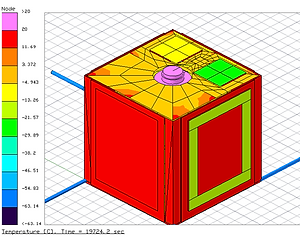
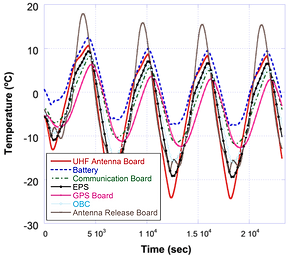
On-orbit Thermal Analysis Results
Propulsion Subsystem (PS)
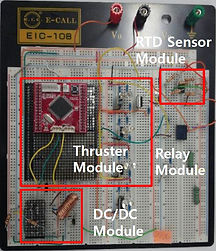
STEP Cube Lab의 탑재체중 하나인 MEMS 기반 고체 추력기는 궤도환경에서 마이크로 점화기의 RTD(Resistance Temperature Detector) 센서 온도 정보를 OBC(On Board Computer)에 전송하고 OBC에서 점화 명령을 받아, 총 5회의 점화를 하는 임무를 수행하게 된다.
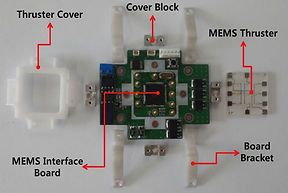
이와 같은 임무 달성을 위하여 추진계에서는 제작된 MEMS 추력기를 STEP Cube Lab의 시스템에 탑재하기 위한 MEMS 추력기 인터페이스 보드를 개발하는 것이 핵심이다. MEMS 추력기 인터페이스 보드는 위성의 구조적/전기적 인터페이스를 만족하고 상기의 MEMS 추력기를 탑재 가능하여야 하며, 이를 고려하여 설계된 보드에 대한 열주기 시험, 기능시험 및 점화시험 등을 수행하고 최종적으로 전체 MEMS 추력기 모듈에 대한 우주환경시험을 수행하여 설계 타당성을 검증하였다.
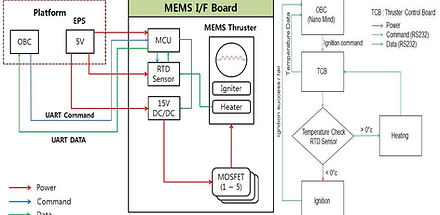
MEMS Thruster I/F Board Block Diagram
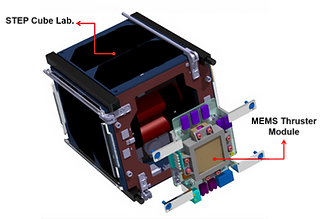
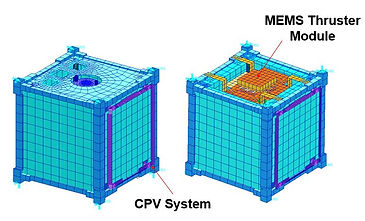
Mechanical I/F of MEMS Thruster Module
MEMS Thruster EM
MEMS Thruster Module
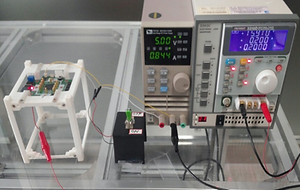
MEMS Thruster Module Function Test
Attitude Determination & Control Subsystem (ADCS)
STEP Cube Lab은 극초소형의 크기 및 총 5가지 탑재체의 궤도검증이라는 임무 특성을 고려하였을 때, 정밀지향 자세를 구현하는 능동적 자세제어의 적용을 요하지 않는다. 따라서 STEP Cube Lab의 자세제어계(ADCS)는 위성 공간활용의 효율성 및 시스템 단순화 측면에서 보다 유리한 수동형 자세제어 방법을 적용하였다. 히스테리시스 댐퍼를 조합한 영구자석으로 인해 지자기의 자력 선에 따라 토크가 발생하며 위성의 자세가 안정화 되는 방식으로, 전력소모가 없으며 시스템이 단순한 장점이 존재하여 큐브위성 등에 폭 넓게 적용되고 있는 방식이다.
이와 같은 영구자석 기반의 수동형 자세제어 방식 적용에 따른 설계 타당성 검증을 위하여 히스테리시스 댐퍼와 조합으로 이루어진 영구자석 안정화 방식 적용을 위한 각 각의 자세제어계 설계치를 도출 및 H/W를 선정하였다. 선정 H/W를 토대로 하여 시뮬레이션을 통해 히스테리시스 유무에 따른 영구자석 안정화 방식의 유효성을 입증하였다.
또한 탑재체 중 MEMS 기반 고체 추력기의 추력 발생에 따른 궤도변화를 확인하기 위하여, 자세제어계는 GPS 모듈을 탑재하고 임무기간동안 계속적으로 수집되는 위치정보 데이터를 관리하는 역할을 담당한다. 관련 참고문헌(클릭)

NdFeB Permanent Magnet

HyMu-80 (Hysteresis Material)

Novatel OEM 615 GPS Board
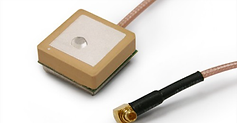
Adatus ADA-15S GPS Antenna
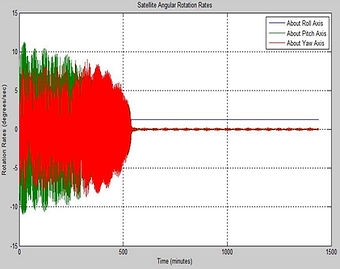
STK On-orbit Attitude Simulation
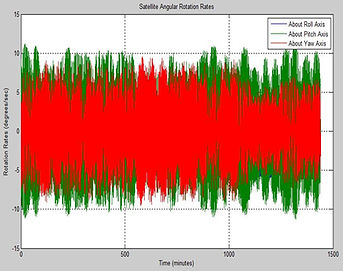
(a)
(b)
Attitude Simulation Results ((a) w/o Hysteresis Damper, (b) with Hysteresis Damper
Electrical Power Subsystem (EPS)
큐브위성의 전력계는 일반 상용위성과 규모에 다소 차이는 있으나 동일하게 1차 전력원인 태양전지판을 이용하여 생산된 전력을 위성의 탑재체와 타 서브시스템의 전기적 부하에 대하여 전력을 조절, 분배하고 여분의 전력을 2차 전력원인 배터리에 저장하는 기능을 수행한다. 따라서 이와 같은 가혹한 우주 궤도환경에서도 위성 전력계는 위성의 임무기간, 임무특성 등을 고려하여 위성 체의 각 버스에 전력을 안정적으로 공급할 수 있도록 설계되어야 한다.
이와 같은 전력계 설계를 목적으로 위성 시스템에 대한 전기 기능 선도 수립 및 전력 버짓 분석 결과 등을 수행하여 전력계 요구조건에 적합한 태양전지 판, 배터리, 전력계 보드 등의 전력계 하드웨어를 상용 제품으로 선정하였다. 선정된 하드웨어를 바탕으로 위성의 임무특성과 전력계 요구조건을 고려하여 상용 S/W인 STK (Systems Tool Kit)과 수치해석 등을 활용한 에너지 밸런스 해석을 수행하여 최종적인 전력계의 임무 타당성을 검증하였다.
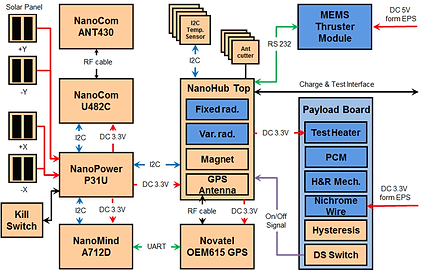
EPS Electrical Power Diagram
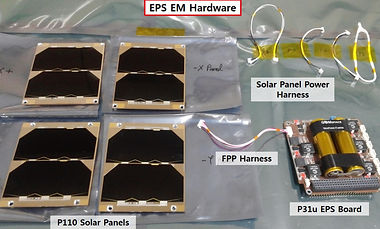
EPS Hardwares (Solar Panel / EPS Board & Li-ion Battery)
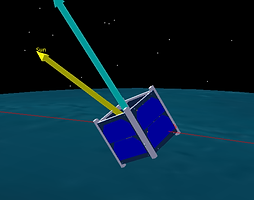
STK Model of STEP Cube Lab.

STK Power Generation Analysis Results
Command & Data Handling Subsystem (C&DHS)
큐브위성 탑재컴퓨터(On Board Computer)는 지상국의 명령을 통해 임무 수행 및 데이터 수집을 수행하며 수집된 데이터는 지상국과 접촉 시 데이터 전송이 가능해야 한다. 또한, 생존 기간 동안의 위성 상태 모니터링을 실시하며, 스케줄, 탑재체 운용, 메모리 관리 및 제어와 같이 모든 서브시스템에 명령을 하달함으로써 위성 전체 시스템을 관리하는 중앙처리장치 역할을 수행해야 한다.
이를 만족하는 큐브위성용 탑재컴퓨터 설계는 형상, 크기, 무게, 우주 궤도환경에서의 생존성 등 제한조건으로 인해 개발에 상당한 시간과 어려움 존재하여 큐브위성 개발 장기화를 초래하는 요인이 되지만 기 개발된 큐브위성용 상용 보드 적용 시 위성개발을 단기간 내에 수행 가능하다는 장점이 있어 기 개발된 탑제컴퓨터 하드웨어를 선정하였다. 또한, C&DH에서는 시스템으로부터 도출된 요구조건을 만족하기 위한 비행 소프트웨어를 개발하며, 구성품 수준에서 시스템 수준으로 기능시험을 수행함으로써 위성의 각각의 전기적인 하드웨어의 검증을 수행하여, 하드웨어 및 비행 소프트웨어의 타당성을 입증하였다.
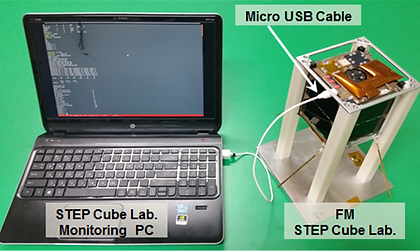
FM EIT Set-up Configuration
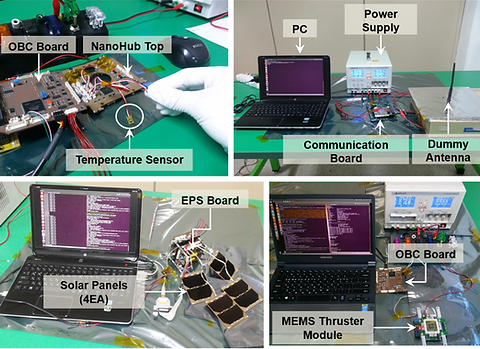
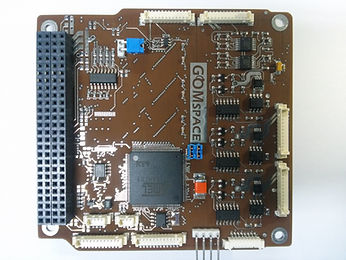
C&DH OBC (On-board Computer) Board
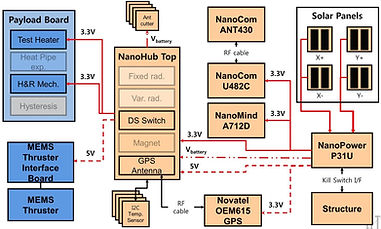
STEP Cube Lab. Electrical System Block Diagram
Subassembly Level Function Test Configuration
Communication Subsystem (CS)
큐브위성의 통신계는 위성이 우주에 발사되어 임무궤도를 수행하는 동안에는 오로지 무선통신으로 위성을 제어하게 된다. 큐브위성의 통신 서브시스템은 운용궤도에서의 위성 상태정보 및 임무데이터를 지상국으로 송신하고, 임무수행을 위해 지상국으로부터의 명령을 수신하게 된다. 또한 큐브위성은 일반위성과는 다르게 중·대형급 위성에 비해 대용량의 통신을 목적으로 하지 않기 때문에 주로 주파수 대역이 낮은 아마추어 무선통신 대역인 VHF/UHF대역과 임무에 따라서 위성용 대역인 S대역을 사용하게 된다.
본 큐브위성은 데이터 용량이 크지 않고 공간 활용을 극대화하기 위해 Buck Converter방식에 기반한 상용 UHF 대역 통신 보드 및 안테나를 선정하였다. 선정된 하드웨어를 바탕으로 위성의 임무특성 및 통신계 요구조건을 고려하여 링크버짓 해석을 수행하여 최종적인 통신계의 임무 타당성을 검증하였다. 관련 참고문헌 (클릭)
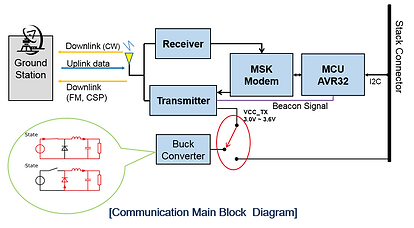
Communication Block Diagram
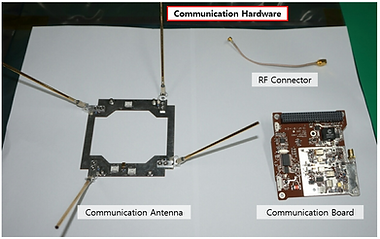
Communication Hardwares (UHF Antenna / Communication Board)
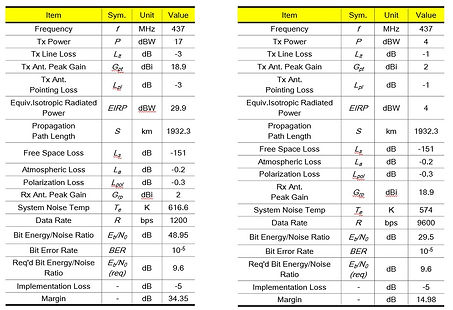
Communication Link Budget(Left:Uplink, Right:Downlink)
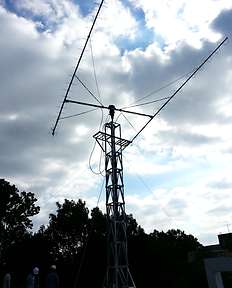
Ground Station (GS)
지상국은 지상에서 위성을 추적하여 명령 및 데이터를 송수신하고 위성을 제어하는 역할을 수행하는 지상 관제소를 뜻한다. STEP Cube Lab.의 지상국은 임무구현 및 데이터 통신을 위하여 위성의 요구조건을 충족하는 지상국 설계를 수행하였으며, 조선대학교 항공우주공학관 4층에 구축되어 있다.
지상국 하드웨어는 크게 RFS(Radio Frequency System), RCS(Rotator Control System), AMS(Antenna Monitoring System)으로 구분되어 있으며 RFS와 RCS는 상용소프트웨어인 Ham Radio Deluxe(HRD) 소프트웨어를 적용하여 제어하고 있다. 지상국 소프트웨어는 리눅스 환경에서 제작되었다.

Ground Station Block Diagram
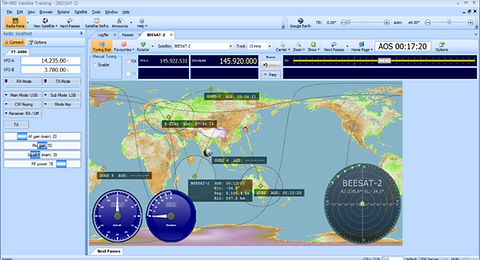
HRD(Ham Radio Deluxe) S/W for Ground Station